K2E-B-S18-1 · Paper Note
FAST-LIO
- Description:FAST-LIO 论文笔记 — 紧耦合迭代卡尔曼滤波激光惯性里程计,前向/反向传播运动补偿、IEKF 迭代状态更新、卡尔曼增益新形式(避免高维矩阵求逆)、源码架构走读
- My Notion Note ID:K2E-B-S18-1
- Created:2023-08-25
- Updated:2026-06-08
- License:转载欢迎:转载请注明作者 Yu Zhang 并附原文出处(yuzhang.io)
Table of Contents
- 1. Summary
- 2. Key Contributions
- 3. Method
- 4. Experiments & Results
- 5. Ablation & Discussion
- 6. Strengths / Limitations / Future Work
- 7. Code Walkthrough
- References
1. Summary
Title: FAST-LIO: A Fast, Robust LiDAR-Inertial Odometry Package by Tightly-Coupled Iterated Kalman Filter Authors: Wei Xu, Fu Zhang (HKU MARS Lab,DJI 资助) Paper: arXiv:2010.08196 (IEEE RA-L 2021, 6(2)) Github: hku-mars/FAST_LIO
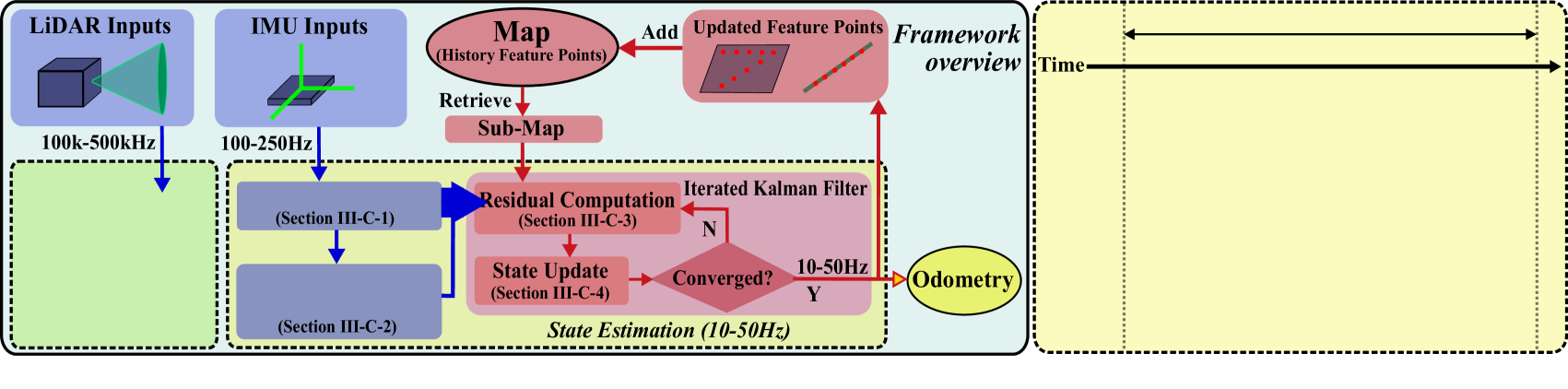
FAST-LIO 提出用紧耦合迭代扩展卡尔曼滤波 (IEKF) 融合 LiDAR 特征点与 IMU,实现快速鲁棒的激光惯性里程计。论文核心贡献是一个新的卡尔曼增益公式,把计算复杂度从测量维度(激光点数 ,可达上千)降到状态维度(,固定),使高密度点云的实时融合成为可能。
系统在流形 上运作,用 算子统一处理旋转量。反向传播对激光扫描期间的运动畸变进行去除,然后 IEKF 迭代重线性化收敛,最后把当前帧配准进 kd-tree 地图。
在无人机平台(DJI Manifold 2-C)上实时运行:户外建筑物序列(140 m)漂移仅 0.05%(0.07 m);相比 LOAM 处理时间 59 ms,FAST-LIO 在更多点的条件下(1430 vs 1107 points)仅需 23 ms。
2. Key Contributions
- 新卡尔曼增益公式:利用矩阵求逆引理将 求逆改写为 ,复杂度从测量维度降到状态维度
- 紧耦合 IEKF:在流形上迭代重线性化,处理点-面残差的强非线性
- 反向传播运动补偿:以扫描结束时刻为基准,IMU 反向积分去除帧内运动畸变
- 轻量、鲁棒,适合无人机等算力受限平台
3. Method
3.1 状态与流形
状态在流形 上:
:IMU 到全局系旋转;:位置;:速度;:陀螺/加速度计 bias;:重力方向(可观)。
算子:旋转部分用李代数 进行加减,其余分量普通加减,见 李群与李代数。
3.2 前向传播(预测步)
每来一帧 IMU,先按离散运动学传播名义状态均值( 为连续 IMU 动力学, 为 IMU 输入,噪声取 0, 为 IMU 间隔):
(论文 Eq.4)
再传播误差状态协方差:
:误差状态转移雅可比;:噪声雅可比;:IMU 过程噪声协方差;:预测协方差。
3.3 反向传播与运动补偿
问题:一帧 LiDAR 扫描耗时 ~100 ms,扫描期间载体在运动,帧内各点在不同位姿下采集→运动畸变。
FAST-LIO 方案:以扫描结束时刻 为基准,对帧内每个点(采集时刻 ),用 IMU 从 反向积分得到 相对 的相对位姿 (只是个刚体变换,不是完整 18 维状态),把点变换到 时刻坐标系→去畸变(paper Eq.10):
为 LiDAR-IMU 外参, 为点在采集时刻 LiDAR 系坐标。
3.4 残差
每个去畸变后的点 ,在地图中找最近平面,残差 = 点到平面距离:
:平面法向量;:平面上一点;:LiDAR-IMU 外参。论文 Eq.12 是更一般形式 :平面特征 (如上),边特征 (点到线,LOAM 风格)。
3.5 迭代状态更新(IEKF)
标准 EKF 一步更新——对强非线性点-面残差收敛不够精确。FAST-LIO 在当前估计点反复重线性化。第 次迭代的更新不是简单加增量,而含两项(paper Eq.18):
第一项 是观测修正;第二项是先验残差拉回( 为预测先验、 为 引入的流形雅可比)——正是它把迭代更新与普通 EKF 单步区分开。迭代直到 收敛( 为预设收敛阈值,典型取 量级;见 高斯滤波家族 §6)。
3.6 卡尔曼增益新形式
核心创新。标准增益:
括号内矩阵维度 = 测量维度 (激光点数,可达上千)→ 计算复杂度(论文原文),极贵。
用矩阵求逆引理(Sherman-Morrison-Woodbury)改写:
括号内矩阵维度 = 状态维度 ,与 无关, 求逆。见 高斯滤波家族 §2。
4. Experiments & Results
平台:Livox AVIA LiDAR + DJI Manifold 2-C(i7-8550U,8 GB)+ 定制 280 mm 轴距无人机。
计算复杂度对比——两种增益公式的实际耗时 (ms)(Table II):
| 激光点数 | 标准公式(旧) | 新公式 |
|---|---|---|
| 307 | 7.1 | 0.07 |
| 717 | 23.4 | 0.11 |
| 998 | 109.3 | 0.25 |
| 1243 | 251 | 0.37 |
| 1453 | 1219 | 0.59 |
| 1802 | 1621 | 1.16 |
1243 点时旧公式需 251 ms(无法实时),新公式仅 0.37 ms——降低约 680 倍。
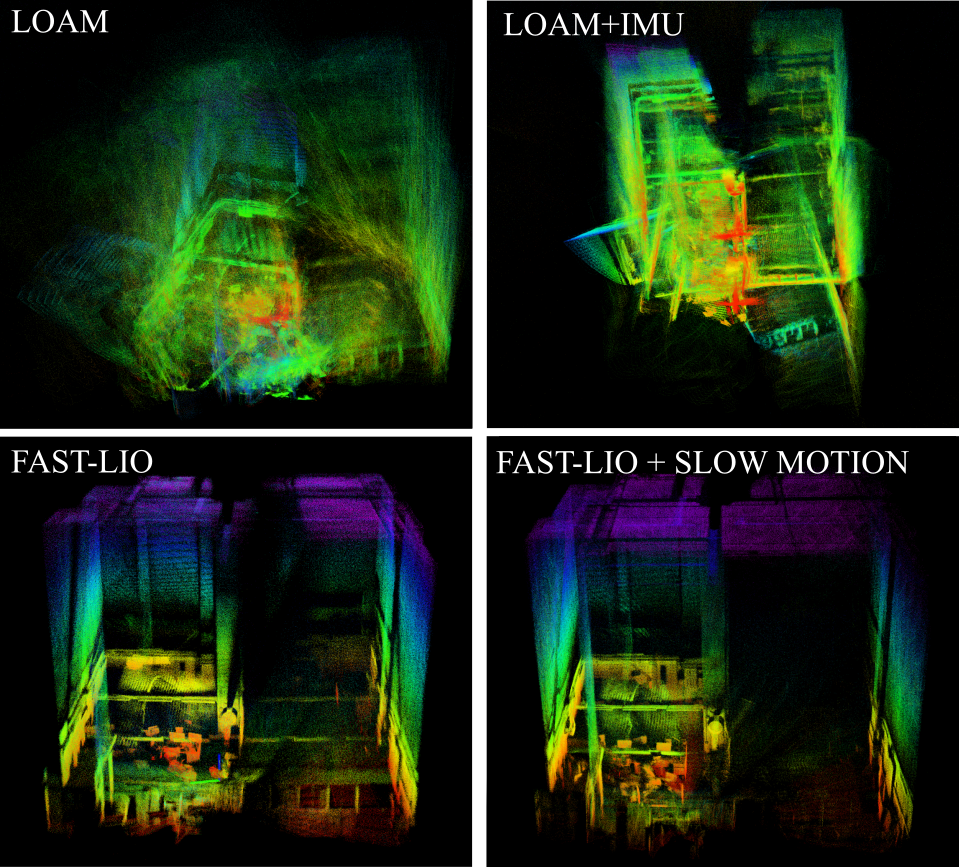
系统对比(室内高旋转场景,Table III):
| 方法 | 有效特征点数 | 处理时间 |
|---|---|---|
| LOAM | 1107 | 59 ms |
| LOAM + IMU | 1107 | 44 ms |
| FAST-LIO | 1430 | 23 ms |
FAST-LIO 用更多点、跑得更快。
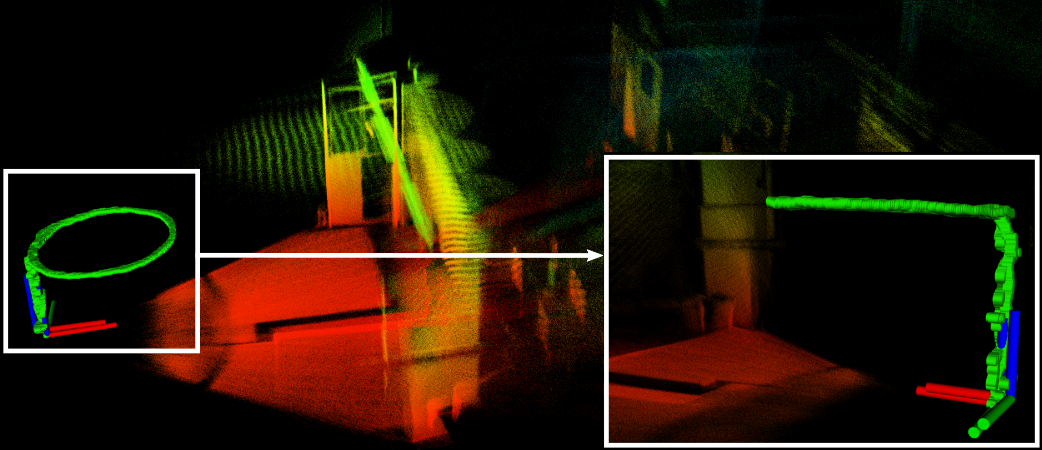
轨迹漂移:
- UAV 室内圆形轨迹(半径 1.8 m,重复 4 圈):漂移 0.3%(0.08 m / 32 m)
- 户外建筑物手持扫描(140 m):漂移 0.05%(0.07 m)
5. Ablation & Discussion
论文无系统性消融实验,以下是主要设计权衡:
- IEKF vs EKF:点-面残差强非线性,单步 EKF 收敛不够;迭代收敛后精度更高,论文未给精度对比数字,但实验结果隐含
- 新增益公式的意义:仅降低计算量,不改变估计精度(数学等价);量化见表 Table II
- 静态 kd-tree vs ikd-Tree:FAST-LIO v1 用静态 kd-tree,新点加入需局部重建;FAST-LIO2 引入 ikd-Tree(自平衡增量插入/删除),避免每帧重建整棵树→进一步提速
- 反向传播 vs 前向插值去畸变:反向传播更精确(利用 IMU 全频率),计算量与前向相当
6. Strengths / Limitations / Future Work
优点:
- 滤波派 LIO 也能达到优化派精度(实验证明)
- 新卡尔曼增益公式是可复用通用技巧,任何高维测量的 KF 都适用
- 轻量:在无人机嵌入式计算机上实时运行,无 GPU 依赖
- 开源,代码结构清晰
局限:
- 无回环 / 全局优化(纯里程计)
- 静态 kd-tree,超大场景需频繁重建(FAST-LIO2 解决)
- 仅支持点-面残差(LOAM 类),边缘特征选用相对保守
后续工作:
- FAST-LIO2(T-RO 2022):直接用原始点 + ikd-Tree,精度和速度进一步提升
- FasterLIO:用 iVox(基于体素的近似最近邻)替代 ikd-Tree
- Point-LIO:去除显式特征提取,直接用全点云
- 港大 MARS Lab 的 LIO 系列基石
7. Code Walkthrough
代码库:hku-mars/FAST_LIO(当前主分支对应 FAST-LIO2,含 ikd-Tree;算法流程与 v1 一致)
7.1 目录结构
FAST_LIO/
src/
laserMapping.cpp ← 主节点:同步、预处理、调度
IMU_Processing.hpp ← 前向/反向传播、状态预测
include/
ikd-Tree/ ← 增量 kd-tree (FAST-LIO2 引入)
IKFoM_toolkit/
esekfom/ ← 流形上 IEKF 库
config/
avia.yaml ← Livox AVIA 参数
velodyne.yaml ← Velodyne 参数
launch/
mapping_avia.launch
mapping_velodyne.launch
7.2 主节点流程(laserMapping.cpp)
main()
├── 初始化 ROS 参数、订阅者(LiDAR / IMU)、发布者
├── 创建 esekf 实例 kf(状态 18 维,输入 12 维)
└── 主循环:
sync_packages() ← 对齐 LiDAR + IMU 时间戳
p_imu->Process() ← 前向传播 + 反向传播运动补偿
kf.update_iterated_dyn_share_modified() ← IEKF 迭代更新
map_incremental() ← 把当前帧点加入 kd-tree 地图
回调:
livox_pcl_cbk()/standard_pcl_cbk():接收 LiDAR 数据,存入lidar_bufferimu_cbk():接收 IMU,缓冲到imu_buffer(含时间戳修正)
7.3 IMU_Processing.hpp — 前向 / 反向传播
IMUPredict()(前向):每帧 IMU 用离散运动方程积分状态;同时传播误差协方差(式 2)UndistortPcl()(反向):从扫描结束时刻反向积分,给帧内每个点计算相对位姿check_state,变换到 时刻坐标系(式 3 前的去畸变)
7.4 esekfom — 流形 IEKF
- 模板库,路径
include/IKFoM_toolkit/esekfom/;主类esekf<state_ikfom, 12, input_ikfom> update_iterated_dyn_share_modified():迭代调用用户定义的h_share_model(计算残差 和雅可比 ),用新公式(式 6)计算增益, 更新状态,直到收敛
7.5 关键配置参数(avia.yaml)
| 参数 | 含义 |
|---|---|
lid_topic |
LiDAR 点云话题 |
imu_topic |
IMU 话题 |
extrinsic_T / extrinsic_R |
LiDAR-IMU 外参(平移 + 旋转矩阵) |
extrinsic_est_en |
是否在线估计外参 |
scan_line |
激光线数(影响特征提取) |
pcd_save_enable |
是否保存点云地图 |
7.6 paper-vs-code 差异
| 论文 | 代码 |
|---|---|
| 静态 kd-tree(v1 论文) | 主分支用 ikd-Tree(v2 的增量树),v1 功能的 branch 已归档 |
| 反向传播描述基于 IMU 反向积分 | UndistortPcl 实现时维护 check_state 链,逐点变换 |
| 新增益公式(式 6) | esekfom/esekf.hpp 中 update_iterated_dyn_share_modified 直接实现 |
| 论文仅描述单线程 | 代码有 ROS 多回调线程,mtx_buffer + sig_buffer 保护共享队列 |
References
| 类别 | 链接 |
|---|---|
| 论文 | Xu W., Zhang F. (2021). FAST-LIO: A Fast, Robust LiDAR-Inertial Odometry Package by Tightly-Coupled Iterated Kalman Filter. IEEE RA-L, 6(2). arXiv:2010.08196 |
| FAST-LIO2 | Xu W., Cai Y., He D., Lin J., Zhang F. (2022). FAST-LIO2: Fast Direct LiDAR-Inertial Odometry. IEEE T-RO. — ikd-Tree + 直接点 |
| 代码 | github.com/hku-mars/FAST_LIO |
| 相关 | iEKF 见 高斯滤波家族 §6;矩阵求逆引理见 高斯滤波家族 §2;流形扰动见 李群与李代数 §9;激光去畸变见本文 §3.3 |