K2E-B-G5-3 · Paper Note
NeRF-SLAM (Rosinol)
- Description:NeRF-SLAM 论文笔记 — DROID-SLAM 稠密跟踪产位姿 + 深度不确定性,加权监督 Instant-NGP 辐射场,实时稠密单目 SLAM
- My Notion Note ID:K2E-B-G5-3
- Created:2024-03-31
- Updated:2026-06-11
- License:转载欢迎:转载请注明作者 Yu Zhang 并附原文出处(yuzhang.io)
Table of Contents
- 1. Summary
- 2. Key Contributions
- 3. Method
- 4. Experiments & Results
- 5. Ablation & Discussion
- 6. Strengths / Limitations / Future Work
- References
1. Summary
Title: NeRF-SLAM: Real-Time Dense Monocular SLAM with Neural Radiance Fields Authors: A. Rosinol, J. J. Leonard, L. Carlone Paper: arXiv:2210.13641 (IROS 2023) Github: ToniRV/NeRF-SLAM
NeRF-SLAM (MIT SPARK Lab, 2022):实时稠密单目 SLAM,将两个成熟模块串联:DROID-SLAM 稠密跟踪(产位姿 + 稠密深度图 + 深度不确定性)和 Instant-NGP 辐射场建图(用不确定性加权深度损失监督)。
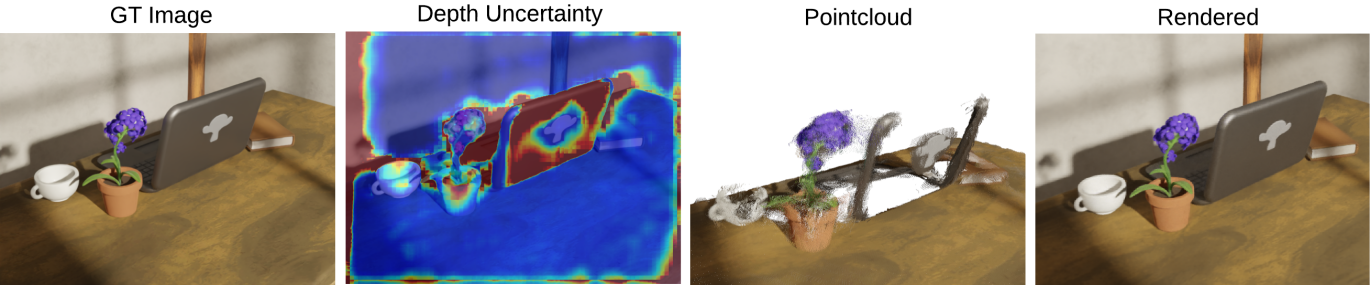
核心创新:稠密深度图有噪声(远点/弱纹理区不确定性大),直接用原始深度监督 NeRF 会带偏几何。论文推导了 DROID-SLAM BA Hessian 的逐像素深度协方差 ,以 Mahalanobis 距离作加权深度损失 → 不确定的深度像素权重自动降低,避免把噪声深度当约束。
Replica 8 场景平均 PSNR 41.40 dB(vs. NICE-SLAM GT 深度 24.61 dB),Depth L1 4.49 cm,整体重建速率 10 FPS (640×480, RTX 2080 Ti;跟踪线程 15 FPS,建图线程 10 FPS 为瓶颈)。
2. Key Contributions
- 深度不确定性推导:从 DROID-SLAM BA Hessian 块结构,经 Schur 补求出逐像素深度协方差 (含位姿不确定性耦合),无需额外网络
- 不确定性加权深度损失:Mahalanobis 距离加权,不确定深度像素自动降权;消融显示不加权时有偏且收敛慢
- 实时双线程:跟踪线程 ~15 FPS,建图线程 ~10 FPS;整体重建速率 ~10 FPS(建图为瓶颈)
- 纯单目稠密重建:不需 RGB-D,在 Replica 上 PSNR 远超 NICE-SLAM(即使后者用 GT 深度)
3. Method
3.1 DROID-SLAM 跟踪
DROID-SLAM 采用 RAFT 风格(用循环 GRU 迭代更新稠密光流场的深度学习架构)的循环更新光流算子,稠密 Bundle Adjustment 以逆深度参数化:
系统矩阵块结构:
为相机块, 为逆深度对角块, 为相机-深度耦合矩阵, 为位姿增量(Lie 代数), 为深度增量。
跟踪窗口 8 关键帧,新关键帧判据:平均光流 > 2.5 像素,~15 FPS 产出位姿 + 稠密深度 + Hessian。
3.2 深度不确定性推导
从 Hessian 块结构经 Schur 补求边缘协方差:
位姿协方差(Cholesky 分解):
为 Schur 消去逆深度后相机块的 Cholesky 因子。
深度协方差(含位姿不确定性耦合):
第二项 把位姿不确定性传播到深度协方差(位姿越不确定,对应深度也越不确定)。 为对角矩阵,给出每像素深度方差。
3.3 不确定性加权建图
建图总损失:
颜色损失 (L2):
深度损失(Mahalanobis 加权 L2):
为 NeRF 渲染期望深度: 为到第 采样点的累积透射率(transmittance), 为该点体密度(volume density), 为相邻采样间距(step size), 为该采样点的深度值。 为 Mahalanobis 距离(等价于逐像素除以方差)。 不确定大 → 对应深度像素加权小。
建图后端:Instant-NGP 多分辨率哈希编码,8 关键帧滑窗。
4. Experiments & Results
数据集
| 数据集 | 评估 | 输入 |
|---|---|---|
| Replica (8 场景) | PSNR, Depth L1 | 单目 RGB |
| Cube-Diorama (合成) | 消融 | 单目 RGB (GT 位姿/深度) |
Replica 结果 (8 场景平均)
| Method | 输入 | Depth L1 (cm) ↓ | PSNR (dB) ↑ |
|---|---|---|---|
| iMAP* | GT 深度 | 7.64 | 6.95 |
| NICE-SLAM | GT 深度 | 4.08 | 24.61 |
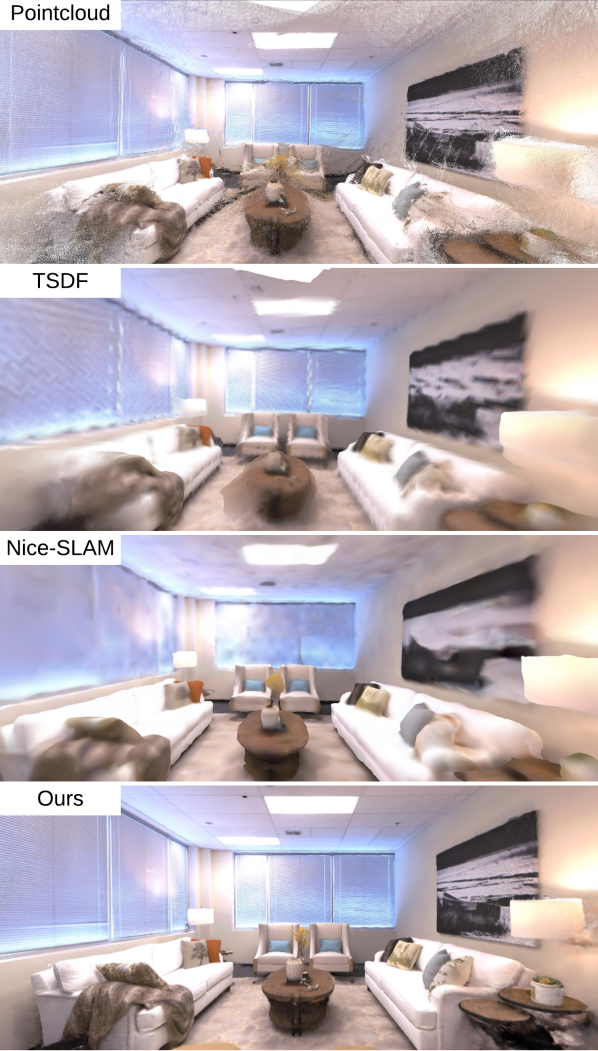
| TSDF-Fusion | DROID 深度 | 21.88 | 7.07 |
| NICE-SLAM (无深度) | 无 | 14.18 | 17.76 |
| NeRF-SLAM | 单目 RGB | 4.49 | 41.40 |
- PSNR 41.40 dB 大幅超过 NICE-SLAM 使用 GT 深度的 24.61 dB
- 单场景最高:office-1 53.44 dB PSNR;最低 room-0 34.90 dB
注:NeRF-SLAM 论文未报告 ATE 跟踪精度,评估聚焦辐射场质量。
5. Ablation & Discussion
消融在 Cube-Diorama 合成数据集上(GT 位姿/深度可用,便于对照):
| 配置 | PSNR 表现 | Depth L1 (cm) |
|---|---|---|
| 无深度监督 | 次差 | 7.8 |
| 原始深度 (不加权) | 最差,有偏 | 4.1 |
| 不确定性加权 (本方法) | 最好 | 4.1 |
- 去掉深度监督:Depth L1 最差(7.8 cm),PSNR 次差
- 不加权原始深度:Depth L1 与加权相同 (4.1 cm),但 PSNR 反而最差(不确定深度被过度信任,把噪声当约束拉偏几何)
- 不确定性加权:PSNR 最优,几何精度与不加权相当但辐射场质量更好
深度监督关键性:加 GT 深度的 NICE-SLAM 才能到 PSNR 24.61 dB;NeRF-SLAM 以 DROID 稠密深度 + 不确定性加权达到 41.40 dB。
6. Strengths / Limitations / Future Work
Strengths
- 纯单目实时稠密重建 (~10 FPS),Replica PSNR 41.40 dB 远超使用 GT 深度的 NICE-SLAM
- 不确定性推导理论严谨,直接从 BA Hessian 计算,无需额外网络
- 双线程流程,实时运行
Limitations
- GPU 内存高:稠密相关体积 + 哈希网格合计 ~11 GB,限制实际部署
- 未评估跟踪精度(ATE),重建质量高但跟踪鲁棒性无系统评估
- 无 ScanNet / TUM 等室外/真实世界 benchmark 评估
Future Work (论文建议)
- 按需计算相关体积(降显存至 ~1.8 GB)
- 活跃区 GPU + 非活跃区 CPU 滑窗策略
References
- Rosinol, A., Leonard, J. J., & Carlone, L. (2023). NeRF-SLAM: Real-Time Dense Monocular SLAM with Neural Radiance Fields. IROS 2023. arXiv:2210.13641
- Teed, Z. & Deng, J. (2021). DROID-SLAM (NeurIPS):跟踪后端
- Instant-NGP 笔记:建图后端
- iMAP 笔记 · NICE-SLAM 笔记:对比基线