K2E-B-S16-2 · Paper Note
OKVIS — Keyframe-Based Visual-Inertial SLAM
- Description:OKVIS 论文与源码笔记 — 紧耦合关键帧滑窗 VIO 的开山系统之一,非线性优化(Ceres)联合视觉重投影误差与 IMU 误差,含完整代码架构走读
- My Notion Note ID:K2E-B-S16-2
- Created:2023-04-10
- Updated:2026-06-11
- License:转载欢迎:转载请注明作者 Yu Zhang 并附原文出处(yuzhang.io)
Table of Contents
- 1. Summary
- 2. Key Contributions
- 3. Method
- 4. Experiments & Results
- 5. Ablation & Discussion
- 6. Strengths / Limitations / Future Work
- 7. Code Walkthrough
- References
1. Summary
Title: Keyframe-Based Visual-Inertial Odometry Using Nonlinear Optimization Authors: Stefan Leutenegger, Simon Lynen, Michael Bosse, Roland Siegwart, Paul Furgale (ETH ASL) Paper: IJRR 2015(会议版 RSS 2013) Github: ethz-asl/okvis
OKVIS 是早期将关键帧滑窗 + 非线性优化用于紧耦合 VIO 的代表系统(与 VINS-Mono 并列为优化派 VIO 标杆)。放弃 EKF 框架,把 VIO 表述为一个关键帧窗口上的非线性最小二乘问题,联合优化视觉重投影误差与 IMU 误差,用边缘化把窗口外信息压缩为先验。
系统基于 Google Ceres 求解器,支持单目 / 双目 / 多目配置(通过 NCameraSystem 管理),立体三角化带不确定度(ProbabilisticStereoTriangulator),Ceres 的 ParameterBlock 抽象使位姿()和速度/bias 的流形更新得以正确处理。
在 EuRoC 数据集上 OKVIS 平均 ATE 0.089 m,优于 VINS-Fusion (0.138 m),与 BASALT (平均 0.051 m)、Kimera (0.119 m) 同期相比处于领先水平(OKVIS2 论文 2022 引用的 OKVIS1 重跑数据)。
2. Key Contributions
- 首批优化派紧耦合 VIO 系统之一(2013 会议版 / 2015 期刊版),证明优化派精度优于 EKF 派(MSCKF)
- 联合代价函数:视觉重投影误差 + IMU 误差在同一 Ceres 问题中求解
- 多相机支持:
NCameraSystem统一管理单目 / 双目 / 多目,外参一并优化 - 部分边缘化:关键帧滑窗维持有界规模,老帧边缘化保留对剩余变量的约束
- 立体带不确定度三角化:远点齐次表示避免退化
3. Method
3.1 状态变量
每帧惯性状态(9 维速度 + bias):
:world 中传感器位置;:world←sensor 姿态四元数;:传感器系速度;:陀螺 / 加速度计 bias。
3.2 联合代价函数
:相机索引,:帧索引,:路标索引;:相机 在帧 时观测到的路标集合(只对实际有视觉观测的 三元组求和);、 为各自信息矩阵; 为边缘化先验残差和信息矩阵(通过 Schur 补把滑出帧的信息压缩而来,是滑窗优化区别于截断式最小二乘的关键)。
3.3 重投影误差
路标 在相机 、帧 上的重投影误差(2 维):
:实测像素;:相机 投影函数(含畸变,见 相机模型与畸变);:第 帧 world→sensor 位姿;:sensor→camera 外参;:齐次路标坐标。
路标用齐次坐标 + ProbabilisticStereoTriangulator 初始化(带不确定度,远点不退化)。
3.4 IMU 误差
相邻关键帧 → 的 IMU 预积分误差(15 维):
为由第 帧状态 + IMU 测量积分预测的第 帧状态。
注:OKVIS 做预积分(ImuError 存 、、协方差),但无一阶解析 bias 修正——bias 漂移超阈值时全量重传播(redoPreintegration)。Forster 预积分(VINS-Mono 采用)用解析修正消除重积分开销(对比见 VIO 预积分)。
3.5 关键帧窗口与边缘化
维护两类帧:关键帧(空间分散,保留较久)+ 时间窗口帧(最近几帧,保 IMU 链连续)。帧出窗口时边缘化(Schur 补)压缩为先验,代价是 fill-in 稠密化。边缘化策略(applyMarginalizationStrategy):
- 非关键帧滑出( 不是关键帧):边缘化 的位姿 + 速度/bias;与 相关的路标不边缘化,其在 的观测在边缘化前先丢弃(drop),以避免填充路标–路标信息块、保持稀疏性
- 关键帧滑出( 是关键帧): 本身不立即边缘化;改为边缘化最老关键帧 (而非触发本次决策的 );只有被 独占、不在 或更新帧中可见的路标才随之边缘化; 的其余路标观测同样先丢弃再边缘化
4. Experiments & Results
OKVIS 原论文(IJRR 2015)在 ETH ASL 自采 MAV 序列上与 MSCKF 比较,精度优势明显。以下为 OKVIS2(2022)论文重跑 OKVIS1 在 EuRoC 11 个序列上的 ATE(m)结果:
| 序列 | OKVIS (v1) | BASALT | Kimera | VINS-Fusion | OKVIS2 Final |
|---|---|---|---|---|---|
| MH_01 | 0.079 | 0.080 | 0.080 | 0.166 | 0.027 |
| MH_02 | 0.044 | 0.060 | 0.090 | 0.152 | 0.023 |
| MH_03 | 0.096 | 0.050 | 0.110 | 0.125 | 0.028 |
| MH_04 | 0.197 | 0.100 | 0.150 | 0.280 | 0.066 |
| MH_05 | 0.206 | 0.080 | 0.240 | 0.284 | 0.068 |
| V1_01 | 0.050 | 0.040 | 0.050 | 0.076 | 0.035 |
| V1_02 | 0.066 | 0.020 | 0.110 | 0.069 | 0.013 |
| V1_03 | 0.071 | 0.030 | 0.120 | 0.114 | 0.019 |
| V2_01 | 0.062 | 0.030 | 0.070 | 0.066 | 0.023 |
| V2_02 | 0.077 | 0.020 | 0.100 | 0.091 | 0.015 |
| V2_03 | 0.028 | — | 0.190 | 0.096 | 0.020 |
| 平均 | 0.089 | 0.051 | 0.119 | 0.138 | 0.031 |
OKVIS v1 平均 ATE 0.089 m,优于 VINS-Fusion(0.138 m);BASALT(0.051 m)和 OKVIS2(0.031 m)后续在回环 / 位姿图优化的帮助下进一步提升。数据来源:arXiv:2202.09199 Table I。
5. Ablation & Discussion
原 IJRR 2015 论文未做系统性消融实验(时代局限,2015 年 VIO 基准尚不成熟)。以下为论文中的主要设计权衡讨论:
- 优化 vs 滤波:OKVIS 是同期"优化派优于滤波派"的直接证据;和同期 MSCKF(EKF)比较精度显著更优
- 预积分策略:无解析 bias 修正,bias 变大时全量重传播——在低 bias 变化率场景影响不大,长时间运动时成本较高(VINS-Mono 和后续工作用解析修正解决)
- 边缘化 fill-in:OKVIS 谨慎管理稀疏结构,但路标边缘化仍带来一定稠密化
6. Strengths / Limitations / Future Work
优点:
- 优化派 VIO 的基石工作,框架清晰,Ceres 实现工程可靠
- 多相机支持,双目 / 单目统一,外参在线优化
- 开源(BSD 3-clause),代码整洁,是后续系统(VINS-Mono、ORB-SLAM3-VI)的重要参考
局限:
- 无回环 / 无全局地图(ETH 发布时明确标注)
- 预积分无解析 bias 修正,bias 漂移时全量重传播开销高
- 边缘化实现复杂;不支持非线性相机 / 鱼眼(OKVIS2 扩展了这点)
后续工作:
- OKVIS2(arXiv:2202.09199):加位姿图 + 回环,精度提升到 0.031 m 均值
- VINS-Mono / ORB-SLAM3-VI:继承滑窗优化思路,加回环与重定位(见 VINS-Mono 笔记)
7. Code Walkthrough
代码库:ethz-asl/okvis
7.1 模块总览
| 模块 | 职责 |
|---|---|
okvis_frontend |
特征检测 / 数据关联 / 匹配 / IMU 传播 |
okvis_ceres |
Estimator、各种 Error/ParameterBlock、边缘化、优化 |
okvis_matcher |
DenseMatcher + 线程池 |
okvis_cv |
相机模型 + Frame / MultiFrame 数据结构 |
okvis_common |
公共类型 (Measurement、Parameters、接口定义) |
okvis_kinematics |
Transformation (SE(3) 位姿) |
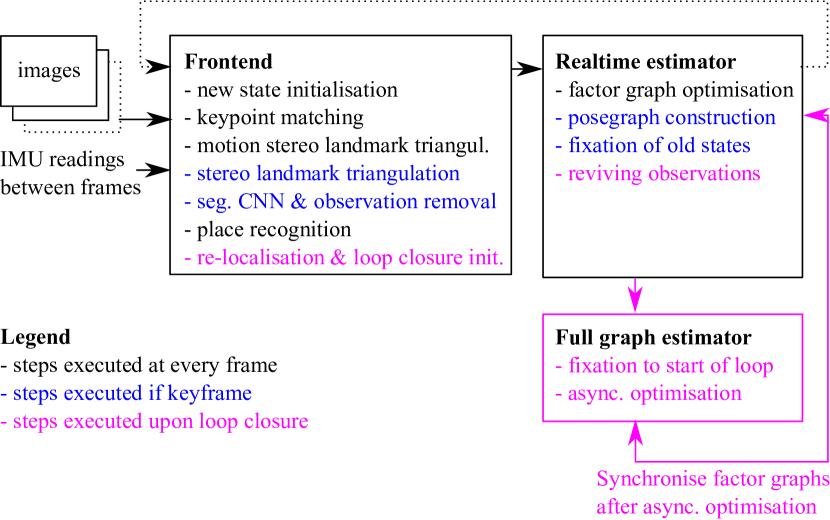
7.2 okvis_frontend — 前端三种匹配
继承 VioFrontendInterface,三个核心接口:detectAndDescribe、dataAssociationAndInitialization、propagation。
matchToKeyframes(3d2d + 2d2d,倒序遍历关键帧):
- 第 1 轮:3d2d 匹配,最多遍历 3 个关键帧(
kfcounter > 2时退出,不论匹配是否成功) - 第 2 轮:2d2d 匹配,最多遍历 2 个关键帧(
kfcounter > 1时退出);未初始化时加runRansac2d2d(RANSAC:随机抽样一致,外点剔除算法) doWeNeedANewKeyframe:用 convexHull overlap(当前帧特征点凸包与关键帧重叠面积比,衡量视场覆盖新颖程度)判断
matchToLastFrame:仅匹配上一帧(age-1 帧;若该帧是关键帧则直接返回 0,由 matchToKeyframes 覆盖),先 3d2d 后 2d2d
matchStereo:单 MultiFrame 内的 1-to-1 立体匹配(无 ransac,代码留 TODO)
7.3 okvis_ceres — 后端
Estimator 继承 VioBackendInterface:
addState:第 1 帧加PoseError+SpeedAndBiasParameterBlock;后续帧加ImuError;若外参在线估计,还加RelativePoseError约束相邻帧 T_SCi 漂移addLandmark:Eigen::Vector4d→MapPoint存入landmarksMap_applyMarginalizationStrategy:滑窗边缘化核心(见 §3.5)
Error 类型:
| 类 | 对应误差 |
|---|---|
ReprojectionError |
视觉重投影(式 3) |
ImuError |
IMU 预积分误差(式 4),含协方差传播 |
PoseError |
初始帧先验约束 |
RelativePoseError |
相邻帧相机外参漂移约束(T_SCi 时间一致性先验,仅外参在线估计时添加) |
7.4 VioKeyframeWindowMatchingAlgorithm
把 Estimator 传入(访问 landmark + 添加观测):
- 3d2d:A 的点投影到 B → 验证重投影误差 → 加 measurement
- 2d2d:
ProbabilisticStereoTriangulator判断三角化可行 → 建 landmark → 加 A/B 两侧观测
7.5 关键参数
| 参数 | 含义 |
|---|---|
VioParameters.optimization.* |
GN/LM 最大迭代、收敛阈值 |
numKeyframes |
关键帧窗口最大帧数 |
numImuFrames |
时间窗口非关键帧数 |
| 立体外参 | NCameraSystem 管理,支持在线精调 |
7.6 paper-vs-code 差异
| 论文 | 代码 |
|---|---|
| 预积分有一致性保证 | bias 漂移超阈值直接全量 redoPreintegration,无解析修正 |
| 边缘化压缩为先验 | applyMarginalizationStrategy 实现复杂,处理路标 / 非关键帧两条路径 |
| 立体三角化带不确定度 | ProbabilisticStereoTriangulator 用角度不确定度过滤退化情况 |
References
| 类别 | 链接 |
|---|---|
| 论文 | Leutenegger S., Lynen S., Bosse M., Siegwart R., Furgale P. (2015). Keyframe-Based Visual-Inertial Odometry Using Nonlinear Optimization. IJRR, 34(3). DOI |
| OKVIS2 | Leutenegger S. (2022). OKVIS2: Realtime Scalable Visual-Inertial SLAM with Loop Closure. arXiv:2202.09199 |
| 代码 | github.com/ethz-asl/okvis |
| 解读 | CSDN: OKVIS 代码解读 / fuxingyin |
| 解读 | 博客园: OKVIS 笔记 / JingeTU |
| 相关 | 预积分理论见 VIO 预积分;滑窗优化见 VIO 滑窗优化;相机畸变见 相机模型与畸变 |