K2E-B-K1-1 · Paper Note
MSCKF — Multi-State Constraint Kalman Filter
- Description:MSCKF 论文笔记 — 滤波派 VIO 的奠基工作,多状态约束 EKF:多历史相机位姿入状态、特征不入状态、零空间投影 (null-space trick)、QR 降维、延迟线性化,附 S-MSCKF 代码走读
- My Notion Note ID:K2E-B-K1-1
- Created:2023-04-10
- Updated:2026-06-11
- License:转载欢迎:转载请注明作者 Yu Zhang 并附原文出处(yuzhang.io)
Table of Contents
- 1. Summary
- 2. Key Contributions
- 3. Method
- 4. Experiments & Results
- 5. Ablation & Discussion
- 6. Strengths / Limitations / Future Work
- 7. Code Walkthrough
- References
1. Summary
Title: A Multi-State Constraint Kalman Filter for Vision-aided Inertial Navigation Authors: Anastasios I. Mourikis, Stergios I. Roumeliotis (University of Minnesota) Paper: ICRA 2007 Github: 无官方代码
MSCKF 是滤波派 VIO 的奠基之作。核心创新:把多个历史相机位姿保留在 EKF(扩展卡尔曼滤波器,对非线性系统做一阶线性化近似的递归状态估计器)状态里,让一个特征点跨多帧的观测形成"多状态约束",而不把特征点本身放进状态——避免状态随地图无限膨胀,实现计算量仅与特征数线性相关(vs SLAM 类方法的二次复杂度)。
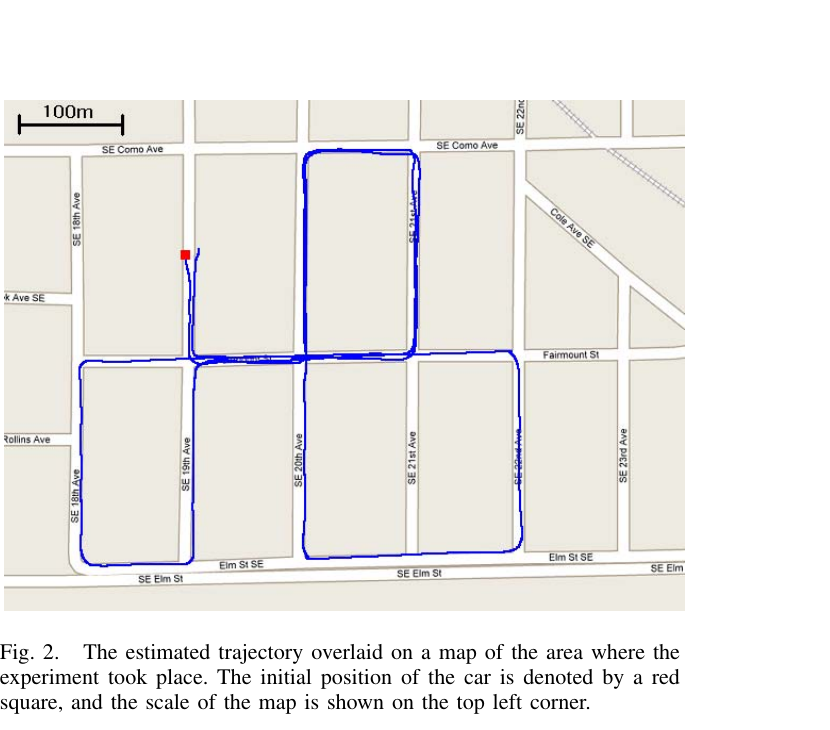
算法在 Minneapolis 室外城区 3.2 km 驾车实验中验证(数据先采集存储,事后离线处理),最终位置误差 ~10 m,漂移仅 0.31%。无 GPS 辅助、无回环。处理速度 14 Hz(Intel T7200 2GHz,高于 3 Hz 采图率),证明算法具备实时运行能力。社区传 Apple ARKit 借鉴了 MSCKF 思路(Apple 未公开证实)。
衍生:S-MSCKF(双目扩展,Sun 2018)、OpenVINS(MSCKF 研究平台,含 FEJ + 在线标定),均已成为 VIO 研究基础设施。
2. Key Contributions
- 特征不入状态:跨多帧的特征观测形成"多状态约束",EKF 更新后特征丢弃——状态规模有界
- 计算量线性:复杂度 , 为特征数, 为状态维度(≤ );vs SLAM-EKF 的
- 零空间投影:消去残差中的特征误差项,使不含特征坐标的约束直接用于 EKF 更新
- QR 降维:大幅降低高维 的 EKF 更新代价
- 鲁棒性:逆深度参数化 + 延迟线性化提高对非线性的抗性
3. Method
3.1 IMU 状态
:unit quaternion(global→IMU);:陀螺/加速度计 bias;:IMU 在全局系速度;:IMU 位置。
3.2 完整状态(含 N 历史相机位姿)
状态维度 ; 上限为 (论文用 30)。
3.3 IMU 传播
连续时间 IMU 运动学(误差状态):
为 系统矩阵, 为噪声输入矩阵,。协方差传播:
离散化:原论文 (Mourikis 2007) 用 5 阶 Runge-Kutta 积分 IMU 状态; 用同样方法积分。注意 S-MSCKF 开源实现 (msckf_vio) 改用 4 阶 RK4(实现简化,与原论文不同,见 §7.5)。
3.4 状态扩增(State Augmentation)
新图像到来 → 当前相机位姿克隆进状态,协方差扩增:
:相机→IMU 外参四元数(已知标定量);:IMU 系下相机原点位置(已知外参);:反对称叉积矩阵。均源自 Eq.(14): 和 。
克隆后状态维度增加 6(新相机位姿)。
3.5 测量模型
特征 在相机 的归一化像素观测:
线性化后:
3.6 零空间投影(Null-space Trick)
残差中含特征误差 (不在状态里)。将所有 次观测残差堆叠,投影到 的左零空间 ():
特征误差项被消掉 → 纯状态约束,直接 EKF 更新。投影后 维度 (减少 3 维,对应特征三个空间坐标的约束冗余)。
3.7 QR 降维
所有特征残差堆叠 ,维度极高。QR 分解:
保留有效部分:,维度从 降到 ( 的列数),节省 EKF 更新代价(,因 )。
3.8 EKF 更新
3.9 何时触发 EKF 更新
- 特征失跟:完整观测轨迹齐了,用于更新
- 窗口满( 位姿):选 个均匀分布的位姿(从次老位姿开始)做更新后丢弃;最老位姿始终保留(基线最长、信息最大)
4. Experiments & Results
平台:Pointgrey FireFly 相机(640×480,3 Hz 采图,14 Hz 处理)+ Inertial Science ISIS IMU(100 Hz);车载 Minneapolis 市区驾驶
关键参数:,SIFT 特征,Intel T7200 2GHz(实时)
实验结果:
| 指标 | 数值 |
|---|---|
| 总行程 | 3.2 km |
| 最终位置误差 | ~10 m(0.31% 漂移) |
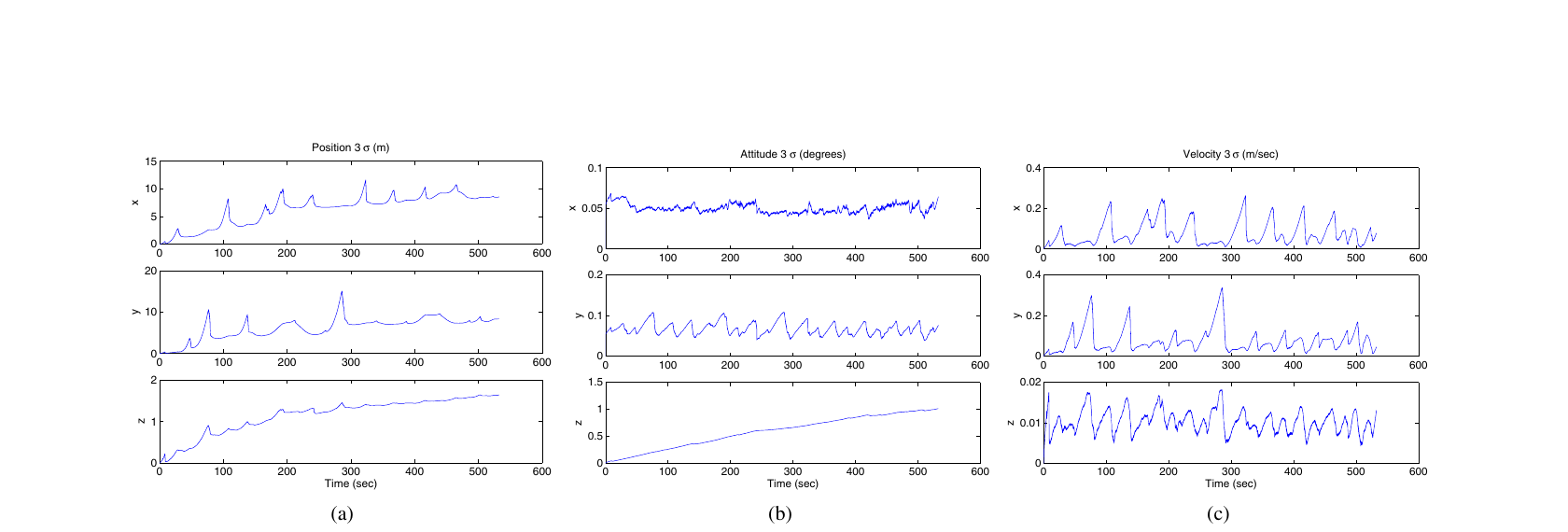
| 姿态精度(3σ) | 优于 1° |
| 速度精度(3σ) | 优于 0.35 m/s |
| 处理特征总数 | 142,903 |
| 实时性 | 14 Hz(Intel T7200 2GHz) |
轨迹在城区街道地图上清晰可辨,起终点位置误差约 10 m(真实终点约 m,估计值 m)。无 GPS 辅助、无回环检测。
5. Ablation & Discussion
原论文无消融实验(单一方法提出论文),以下为设计权衡讨论:
- 特征不入状态 vs EKF-SLAM:避免状态膨胀,复杂度 vs ;代价是三角化引入近似误差
- N_max 选择: 够利用大部分约束,超过后边际收益递减;更大窗口增加更新代价()
- 延迟线性化:多次观测后再线性化 → 初值更接近真值 → 雅可比更准 → 更新质量更高(类似迭代 EKF 的思路)
- 逆深度参数化:远点在欧氏深度下病态;逆深度保持数值稳定(见 三角化)
6. Strengths / Limitations / Future Work
优点:
- 滤波派 VIO 的范式定义者——后续所有 MSCKF 变体的基础
- 计算量仅与特征数线性相关,适合资源受限平台
- 无需地图持久化,内存占用有界
- 代码实现(S-MSCKF)极为整洁,广泛用于研究
局限:
- 无回环(纯里程计)
- EKF 线性化误差积累,长时间漂移高于优化派(OKVIS/VINS)
- 无局部地图重用(特征用完即丢)
- 原版单目,双目需 S-MSCKF 扩展
后续工作:
- S-MSCKF(Sun 2018):双目扩展,EuRoC 优于 VINS-Mono 部分序列
- OpenVINS:MSCKF + FEJ(First Estimates Jacobian,首估计雅可比:线性化点固定后不随状态更新,保证可观性矩阵结构一致、避免不一致性漂移)+ 在线标定,成为 VIO 研究标准平台(见 OpenVINS 文档)
- MSCKF 2.0(改进版):更好的可观性约束
7. Code Walkthrough
参考实现:S-MSCKF:KumarRobotics/msckf_vio(双目,Sun 2018,ROS)
7.1 目录结构
msckf_vio/
src/
image_processor.cpp ← 前端:特征检测/跟踪/立体匹配
msckf_vio.cpp ← 核心:状态传播 + 扩增 + 更新
include/msckf_vio/
image_processor.h
msckf_vio.h
config/
camchain.yaml ← Kalibr 格式外参 + 内参
7.2 image_processor — 前端
两步前端:
stereoCallback():收到双目帧 → Shi-Tomasi 角点检测 + Lucas-Kanade 光流跟踪 → IMU 旋转预测辅助 + 2-Point RANSAC(利用已知旋转将 5 点法退化为 2 点问题,随机采样 2 对特征即可求解平移,提高外点剔除效率)去外点publish():输出跟踪特征点列表到后端
IMU 旋转预测:用帧间 IMU 积分的旋转量补偿特征预测位置,提高光流精度。
7.3 msckf_vio — 核心滤波器
主流程(imuCallback + featureCallback):
imuCallback()
└── batchImuProcessing() ← 4 阶 RK4 积分 IMU(式 3-4)+ 状态传播(原论文为 5 阶 RK)
featureCallback()
├── stateAugmentation() ← 克隆当前位姿 + 扩增协方差(式 5-6)
├── addFeatureObservations() ← 更新特征观测记录
├── removeLostFeatures() ← 失跟特征 → processFeatures() EKF 更新
└── pruneCamStateBuffer() ← 窗口满 → 选 N/3 位姿更新后删除
measurementUpdate()(零空间投影 + QR + EKF 更新):
for each feature:
三角化 → 计算 H_X^(j) + H_f^(j)
左零空间投影 A → 消掉 H_f^(j)(式 9)
stacking → QR 分解(式 10)→ T_H, r_n
compute K(式 11)→ ΔX → update P(式 12)
7.4 关键参数(config/camchain.yaml)
| 参数 | 含义 |
|---|---|
cam0/T_cam_imu |
相机0—IMU 外参( 齐次矩阵) |
cam0/intrinsics |
内参 [fx, fy, cx, cy] |
max_cam_state_size |
(默认 20) |
feature_translation_threshold |
特征运动最小阈值(过滤静态场景假运动) |
noise_gyro / noise_acc |
IMU 随机游走噪声密度 |
7.5 paper-vs-code 差异
| 论文(原版单目 MSCKF) | S-MSCKF 代码(双目) |
|---|---|
| 单目,相机从 IMU 状态派生 | 双目,用立体初始化约束深度(更准) |
| SIFT 特征 | Shi-Tomasi + LK 光流(速度更快) |
| 作演示 | 可配置(默认 20) |
| 论文无在线外参估计 | S-MSCKF 代码支持相机—IMU 外参在线更新 |
| IMU 积分用 5 阶 Runge-Kutta | 代码改用 4 阶 RK4(predictNewState,实现简化) |
References
| 类别 | 链接 |
|---|---|
| 论文 | Mourikis A.I., Roumeliotis S.I. (2007). A Multi-State Constraint Kalman Filter for Vision-aided Inertial Navigation. ICRA. PDF |
| S-MSCKF | Sun K. et al. (2018). Robust Stereo Visual Inertial Odometry for Fast Autonomous Flight. IEEE RA-L. arXiv:1712.00036 |
| 代码 | KumarRobotics/msckf_vio (S-MSCKF 双目实现) |
| OpenVINS | Geneva P. et al. (2020). OpenVINS. ICRA. docs.openvins.com |
| 笔记参考 | xinliang-zhong.vip/msckf_notes |
| 相关 | EKF 见 高斯滤波家族;零空间/可观性见 VIO 滑窗优化;逆深度见 三角化 |