K2E-B-G5-10 · Paper Note
LONER
- Description:LONER 论文笔记 — 首个实时 LiDAR-only 神经隐式 SLAM,ICP 跟踪 + MLP 隐式地图,Jensen-Shannon 动态边距损失防灾难遗忘
- My Notion Note ID:K2E-B-G5-10
- Created:2024-03-31
- Updated:2026-06-11
- License:转载欢迎:转载请注明作者 Yu Zhang 并附原文出处(yuzhang.io)
Table of Contents
- 1. Summary
- 2. Key Contributions
- 3. Method
- 4. Experiments & Results
- 5. Ablation & Discussion
- 6. Strengths / Limitations / Future Work
- References
1. Summary
Title: LONER: LiDAR Only Neural Representations for Real-Time SLAM Authors: S. Isaacson, P.-C. Kung, M. Ramanagopal, R. Vasudevan, K. A. Skinner Paper: arXiv:2309.04937 (IEEE RA-L 2023) Github: umautobots/LONER
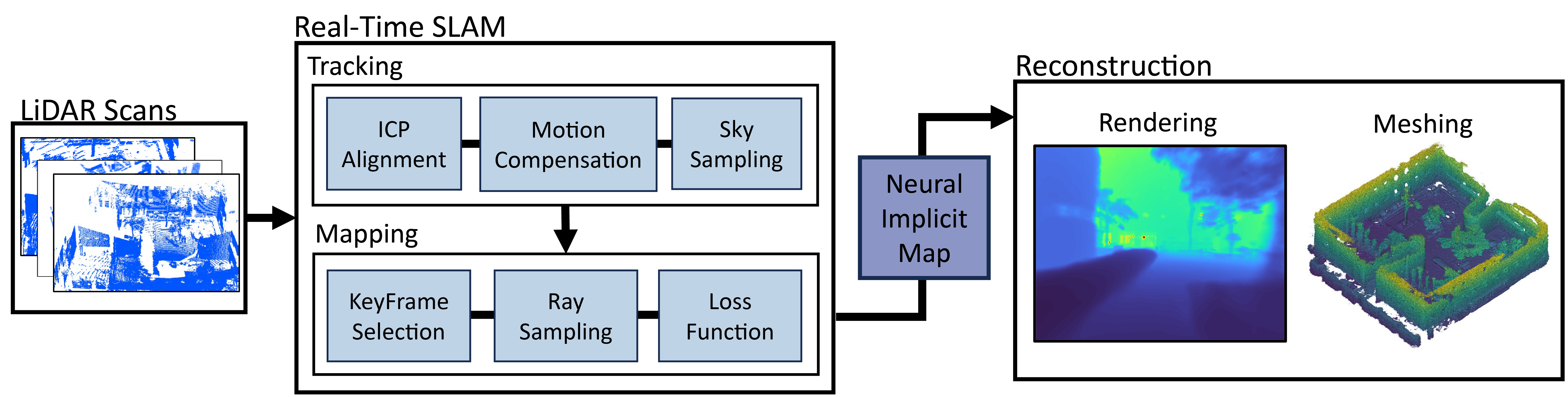
LONER (U. Michigan, 2023):首个实时 LiDAR-only 神经隐式 SLAM。双线程并行:跟踪线程 (Point-to-Plane ICP, 5 Hz) + 建图线程 (MLP 隐式地图, ~18 Hz)。纯 LiDAR,无 IMU、无 RGB。
核心创新:Jensen-Shannon 动态边距损失:在线 SLAM 中各区域学习进度不均,统一固定边距要么欠拟合新区域、要么引发已学区域灾难遗忘。LONER 按目标分布与预测分布的 Jensen-Shannon 散度逐射线自适应调整边距 :未学好区域大边距快学,已学好区域小边距防遗忘。
Fusion Portable MCR 序列 ATE 0.029 m(vs LeGO-LOAM(轻量化地面优化 LiDAR 里程计与建图,Shan & Englot 2018)0.052 m);Newer College Quad Easy ATE 0.130 m;建图 ~18 Hz,跟踪 5 Hz,实时 (Ryzen 5950X + A6000)。
2. Key Contributions
- 首个实时 LiDAR-only 神经隐式 SLAM:无 IMU/RGB,双线程实时 (5 Hz 跟踪 + 18 Hz 建图)
- JS 动态边距损失:按 JS 散度逐射线自适应 ,同时防遗忘和快速学习新区域
- ICP 跟踪取代 NeRF 位姿优化:省出 GPU 资源给建图,是实现实时的关键取舍
- 关键帧重放:随机历史关键帧重放维持全局地图一致性(消融中对 ATE 有显著贡献)
- 天空射线惩罚: 抑制指向天空的射线产生虚假表面
3. Method
3.1 跟踪 — Point-to-Plane ICP
- 输入 LiDAR 扫描降采到 5 Hz
- Point-to-Plane ICP 估相邻帧相对位姿(不用 IMU)
- 匀速运动假设做运动补偿(LiDAR 旋转期间去畸变)
- 用 ICP 而非 inverse-NeRF 位姿优化 → 跟踪 GPU 开销极小,把 GPU 留给建图(实时关键取舍)
3.2 隐式地图与体渲染
地图 = MLP + 分层特征网格编码,输出每点密度 。沿 LiDAR 射线体渲染:
为透射率, 为密度, 为采样间距, 为采样距离, 为射线权重, 为渲染期望深度。
每关键帧窗口: 帧,每帧 条射线,每射线 个采样点。
3.3 Jensen-Shannon 动态边距损失
问题:在线 SLAM 各区域学习不均。固定深度边距 → 大了忘旧区域,小了学不好新区域。
目标分布:,,以真实深度 为中心的高斯目标。
样本分布:,由预测权重推断的均值和方差。
动态边距(按每条射线的 JS 散度缩放):
其中 。预测差( 大)→ 大(深度范围宽,快学);预测好( 小)→ 小(深度范围窄,防遗忘)。
JS 主损失(权重分布对齐):
,即目标高斯 在各采样深度 处的值归一化后的目标权重; 为网络预测权重。第二项 惩罚预测权重不归一(即确保 ,使预测分布为合法概率分布)。
注:论文取 (clip 范围),与标准 JS 散度 不符 — 实现中可能使用未归一化(不乘 )的 JS 度量或对 KL 散度之和,具体缩放以论文源码为准。
总损失:
- ,(弱权辅助约束)
- 对指天射线,(惩罚天空方向的虚假表面)
3.4 建图系统
建图线程按时间选关键帧(每 3 s 一帧),窗口 8 帧,联合优化 MLP 参数 + 位姿(6-DoF twist )。
历史关键帧重放:优化窗口 = 当前关键帧 + 随机采样的历史关键帧 → 维持全局地图一致性(避免只优化最近帧导致遗忘)。消融显示去掉重放后 ATE 从 0.029 m 升至 0.077 m。
建图 ~18 Hz(56 ms/次,每关键帧 50 次迭代 = 2.79 s/关键帧);跟踪 14 ms/帧,5 Hz。
4. Experiments & Results
数据集
| 数据集 | 场景 | 评估 |
|---|---|---|
| Fusion Portable | MCR Slow 01 (室内)、Canteen Day、Garden Day (半室外) | ATE |
| Newer College | Quad Easy (室外大场景,2 圈) | ATE |
跟踪精度 (ATE RMS, m)
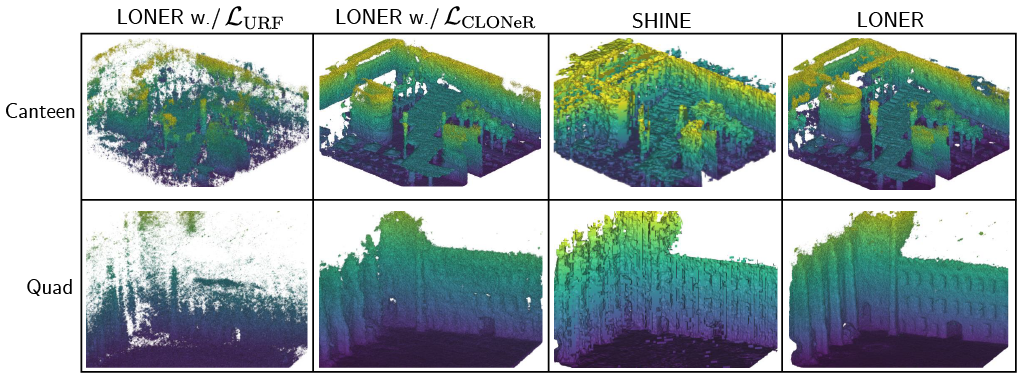
对比:L_CLONeR(CLONeR 的 LiDAR-only 变体,同组前序工作,无 JS 动态边距)。
| 序列 | LeGO-LOAM | L_CLONeR | LONER |
|---|---|---|---|
| MCR Slow 01 | 0.052 | 0.034 | 0.029 |
| Canteen Day | 0.129 | 0.071 | 0.064 |
| Garden Day | 0.161 | 0.073 | 0.056 |
| Quad Easy | 0.126 | 0.306 | 0.130 |
LONER 在 4 序列中均超过 LeGO-LOAM;L_CLONeR 在 Quad Easy (最大最开阔序列) 退化严重,LONER 鲁棒。
建图质量 (MCR Slow 01)
| Metric | NICE-SLAM | SHINE | LONER |
|---|---|---|---|
| Accuracy (m) ↓ | 0.621 | 0.164 | 0.186 |
| Completion (m) ↓ | 0.419 | 0.075 | 0.069 |
| Recall ↑ | 0.476 | 0.757 | 0.932 |
LONER 补全率 (Recall 0.932) 最高,接近 SHINE(SHINE 需 GT 位姿)。
5. Ablation & Discussion
SLAM 框架消融 (MCR Slow 01):
| 配置 | ATE (m) |
|---|---|
| 无位姿优化 | 0.077 |
| 全 LONER | 0.029 |
位姿联合优化贡献巨大 (2.7× 提升)。
损失函数消融 (MCR Slow 01):
| 配置 | ATE (m) | Depth L1 |
|---|---|---|
| 仅深度损失 | 0.046 | 0.355 |
| 深度 + LOS | 0.033 | 0.338 |
| 全 LONER | 0.029 | 0.284 |
JS 动态边距损失是最关键项;天空损失在室外场景防止虚假远端表面。
6. Strengths / Limitations / Future Work
Strengths
- 首个实时 LiDAR-only 神经隐式 SLAM(5 Hz 跟踪 + 18 Hz 建图)
- JS 动态边距在线自适应防遗忘,理论严谨
- ATE 优于传统 LeGO-LOAM,同时产出稠密隐式地图
Limitations
- 仅限静态/慢速场景(无动态物体处理)
- 无 RGB — 不产出颜色地图
- 天空分割需近似水平 LiDAR 姿态,坡道/俯仰运动处理有限
- 无回环闭合
Future Work
- 动态物体处理
- 城市级大场景扩展
- IMU 集成提升跟踪鲁棒性
References
- Isaacson, S., et al. (2023). LONER: LiDAR Only Neural Representations for Real-Time SLAM. IEEE RA-L 2023. arXiv:2309.04937
- 项目页: umautobots.github.io/loner
- NeRF-LOAM 笔记:同期 LiDAR 神经隐式 SLAM,侧重离线重建质量
- Shan & Englot (2018). LeGO-LOAM (IROS):传统 LiDAR 里程计对照